А в какой степени свободны Вы?
Речь идёт не о социальных свободах, а более формализуемых - механических. Да-да, опять эта физика. Надеюсь хоть в этот раз смогу рассказать как можно попроще.
В теоретической механике есть понятие "число степеней свободы". Грубо говоря - это то число независимых перемещений механической системы. Слово независимый тут является ключевым, но вернёмся обратно. Пример: Столб вкопанный в землю имее степень свободы 0 - он вообще не может двигаться. Поршень в насосе или двигателе - степень свободы 1 - двигается только в одном направлении -вверх-вниз, крутиться поршню не даёт шатун. Ннежелательные перекладывания и люфты не учитываем - мы же играем в теорию, а не практику. 😉
Сейчас, для простоты, будем говорить исключительно о нашем, привычном евклибовом пространстве. Так вот свободная, не связанная с к-либо механической системой, геометрическая точка (ну со школы же должны помнить, что точка не имеет размера) имеет три степени свободы - вверх-вниз, влево-вправо и вперёд-назад. Движение под углом - это просто совокупность этих трёх движений, если мы должным образом повернём систему координат - всё встанет на свои места.
А вот любое, свободное трёхмерное тело, оказывается ещё может дополнительно и вращаться по трём осям:

Для твёрдого тела 6 - это максимальное кол-во степеней свободы.
Тут вроде всё понятно и доступно. Но механика исследует механизмы, зачастую сложные.
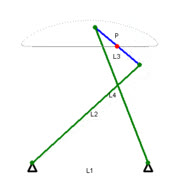
Казалось бы должно быть много больше, но мы видим, что все звенья взаимосвязаны, и какую бы точку в каком бы звене мы не выбрали - она будет двигаться только по одному криволинейному пути. Это как поезд на рельсех - вперёд или назад, и пофиг как извивается Ж/Д дорога - путь будет только один.
Расчёт шарнирных систем и кол-во степеней свободы - это уже нехилая такая математика, потому не буду вам и себе пудрить мозг. Скажу только что у человеческой руки (без учёта пальцев кисти) семь степеней свободы, а жётско закреплённую роботизированную руку сделали с восемью степенями свободы (и тут железные ящики переплюнули кожанных мешков).
Вообще кол-во степеней свободы механизмов во многом зависит от количества звеньев - чем больше тем лучше. На практике же роборука должна обладать сервоприводами, поворотными механизмами + учитываются ещё и допустимые нагрузки - это уже достаточно сложная инженерная задача.

В довесок задачач со звёздочкой: какое кол-во степеней свободы у резинового мячика (ответ в спойлере)?
Ответ: бесконечное, потому как надо рассматривать деформацию мяча, т.е. каждая точка, каждая молекула мяча имеет свои степени свободы
Комментарии