Я свободен в 156 степени. Это насколько свободно?
Автор про свободу движений задал вопрос: А в какой степени свободны Вы?
Мой ответ - В 156, и в 289.
Вопрос: Какой ответ верный?
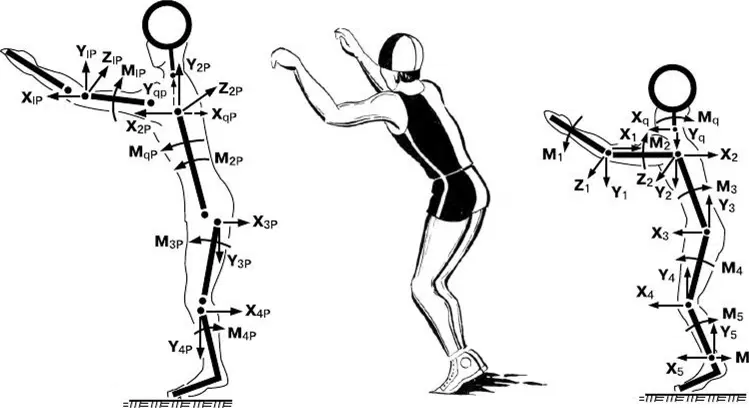
Если сравнивать строение опорно-двигательного аппарата человека с различными системами механизмов, то можно выделить как отдельные крупные "узлы", например, локтевой сустав состоит из 3 частей- сам шарнир и 2 прикрепленных к нему кости, которые могут вращаться в суставной сумке (впадине).
Будем рассматривать механические системы, состоящие из твёрдых, нерастяжимых и негнущихся звеньев, соединённых шарнирами. Шарниры для начала рассмотрим двух типов: цилиндрические и шаровые.
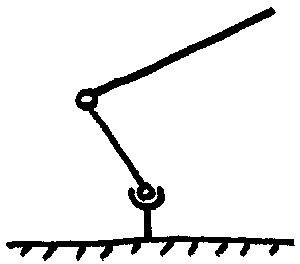
Цилиндрический шарнир: с двумя свободными звеньями и с одним закреплённым звеном — опорой.
Где мы можем найти такое соединение в человеческом теле? Это, например, локтевой сустав. Межфаланговые суставы пальцев. Коленный сустав, в первом приближении, тоже подходит, хотя с ним всё несколько сложнее: тут реальная биомеханика сильно отходит от абстрактного механизма.
Цилиндрический шарнир, или шарнирная петля, это соединение двух звеньев, которое позволяет им вращаться вокруг общей оси. Или, если мы считаем одно звено неподвижно закреплённым — неподвижной опорой, — то этот шарнир позволяет второму звену вращаться вокруг оси шарнира.
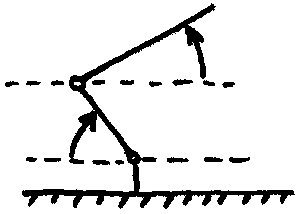
Возьмём цилиндрический шарнир с одним закреплённым звеном. На рисунке закреплённое звено изображено просто как неподвижная опора. Свободное звено может двигаться только одним образом: поворачиваться вокруг оси шарнира, оставаясь при этом в одной плоскости. Его незакреплённый конец двигается при этом только по одной линии — дуге окружности с центром на оси шарнира.
Если мы зафиксируем плечевую кость, то наш шарнир будет закреплен и неподвижен.
Второй тип шарнира — это шаровой шарнир, где звенья вращаются вокруг общей точки. Опять же, можно считать одно звено неподвижной опорой, тогда второе звено может вращаться вокруг некоторой точки этого шарнира. Точки, а не оси.
Какие суставы в нашем теле подходят под эту модель? Плечевой и тазобедренный.
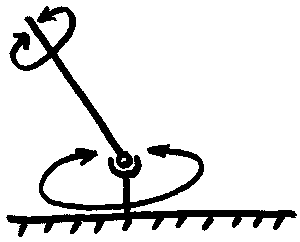
Шаровой шарнир допускает уже гораздо больше различных движений. Свободное звено может качаться в нём во все стороны. К тому же оно может поворачиваться вокруг собственной продольной оси, оставаясь на месте. Всё то же самое умеет делать и наше плечо. Незакреплённый конец свободного звена двигается при этом уже не по линии, а по участку сферы с центром в шарнире.
Для того, чтобы однозначно задать положение звена, нам потребуются три угла. Два из них задают наклон звена в пространстве, а третий — поворот звена вокруг собственной оси. Получаем три координаты и три степени свободы для шарового шарнира и плечевого сустава.
Человеческие суставы вообще устроены гораздо сложнее, чем простые шарниры. Приведём ещё пару примеров суставов, не подходящих под простейшие механические схемы.
Кажется, что коленный сустав вполне подходит под схему цилиндрического шарнира. Если мы зафиксируем бедро — например, сядем на стол, свесив ноги, — то колено будет качаться, рисуя дугу, так же, как свободное звено шарнира. Но, на самом деле, при согнутом колене голень может ещё и немного поворачиваться вокруг своей продольной оси, добавляя коленному суставу ещё одну степень свободы. Когда мы сгибаем колено, ослабляется натяжение некоторых связок коленного сустава, крепление голени становится более свободным и появляется возможность поворота, которой нет, когда колено выпрямлено. Получается, что коленный сустав имеет одну степень свободы при почти выпрямленном колене и две при согнутом.
Локтевой сустав мы тоже приводили как пример цилиндрического шарнира. И он действительно подходит под эту схему, если мы будем рассматривать крепление только локтевой кости. Но, говоря о лучезапястном суставе, мы заметили, что предплечье может поворачиваться, обеспечивая движение пронации/супинации кисти.
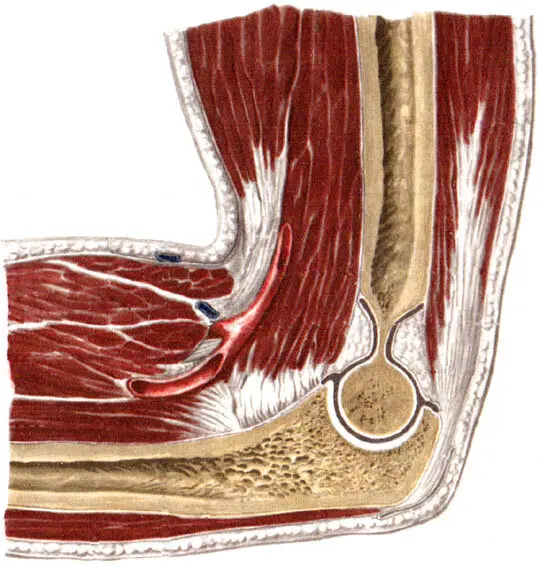
Это возможно из-за сложного устройства локтевого сустава, состоящего фактически из трёх отдельных суставов. В нём сходятся три кости — плечевая, локтевая и лучевая — и каждая пара костей соединяется своим суставом.
Локтевая кость крепится к плечевой суставом с одной степенью свободы, образуя цилиндрический шарнир. А вот лучевая соединяется с плечевой уже шаровидным суставом — аналогом шарового шарнира, с тремя степенями свободы. Подвижность лучевой кости относительно локтевой ограничивается двумя суставами, которыми они скреплены: в локте и в запястье.
Всё это сложное устройство приводит к тому, что лучевая кость может неким своеобразным образом проворачиваться вокруг локтевой. Кисть крепится именно к лучевой кости лучезапястным суставом и поэтому может воспользоваться её подвижностью. При этом локтевая кость остается неподвижной. Т. е. к одной степени свободы, которую имеет локтевой сустав, на протяжении предплечья добавляется ещё одна.
Заметим, что, хотя голень тоже состоит из двух костей — большеберцовой и малоберцовой, — но в ней отсутствует механизм, подобный предплечью, и обе эти кости двигаются как одна.
Соединим теперь три звена. Первое будет, как обычно, неподвижной опорой. Второе присоединим к нему цилиндрическим шарниром. А к свободному концу второго звена прикрепим ещё одно звено. Тоже цилиндрическим шарниром. Наш механизм для простоты сделаем плоским: пусть оси обоих шарниров будут параллельны, тогда все звенья будут двигаться в одной плоскости.
Сколько координат нам понадобится, чтобы задать положение всего механизма? Первое звено неподвижно, его положение известно. Второе звено мы можем повернуть в шарнире на какой-то угол. Не любой: угол поворота как-то ограничен неподвижным звеном, но нам это не важно. Одного этого угла нам достаточно, чтобы задать положение второго звена. Зададим этот угол.
При этом дальний конец первого звена окажется во вполне определённой точке. Мы можем рассчитать положение этой точки по заданному углу и длине этого звена. (Длину звена мы не считаем координатой, поскольку она постоянна.) В этой точке находится шарнир, которым крепится третье звено. Значит, чтобы задать положение и этого звена, нам достаточно задать угол его поворота (например, относительно второго звена) — точно так же, как для второго звена.
Получается, что задав две координаты — два угла — мы задаём положение всего нашего механизма. Значит, у него две степени свободы.
Заметьте, что соединив звенья двумя шарнирами, каждый из которых даёт одну степень свободы, мы получили две степени свободы. Т. е. степени свободы просто складываются.
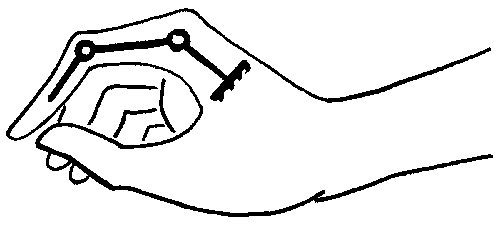
В теле подобный механизм можно найти в пальцах руки: это два последовательных фаланговых сустава.
Теперь в нашем механизме из трёх звеньев заменим первый шарнир на шаровой, а второй так и оставим цилиндрическим.
Аналогией в нашем теле будет соединение предплечья и плеча с туловищем. При этом мы не учитываем способность предплечья поворачивать кисть.
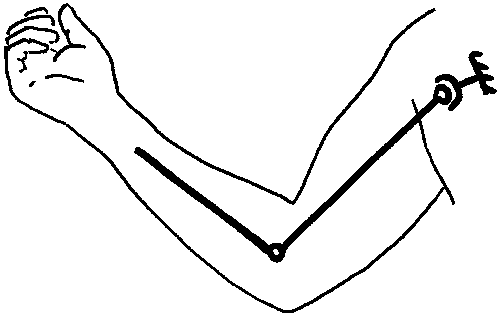
Если вы помните, шаровой шарнир имеет три степени свободы. Прибавляя к ним одну степень свободы второго шарнира, цилиндрического, получаем четыре степени свободы. И действительно: положение второго звена (первое — неподвижное) мы задаём тремя углами. При этом положение второго шарнира и направление его оси вычисляется. Поэтому для задания положения третьего звена нам нужен ещё только один угол его поворота в цилиндрическом шарнире. Значит, чтобы задать точное положение всего механизма, нужны четыре угловые координаты. И наш механизм действительно имеет четыре степени свободы.
Выше мы писали, что если тело двигается по какой-либо поверхности, то у него две степени свободы. Три — если мы хотим учитывать также и поворот тела в этой плоскости. Будем двигать ладонью по столу. Вот тело, которое двигается по поверхности. Значит, у ладони три степени свободы. А где же семь?
Но мы также писали, что подсчёт степеней свободы зависит от модели, от задачи. Если нам важно только положение ладони на столе и неважно, что там дальше к ней крепится и что с ним происходит, то степени свободы три. Если же мы хотим знать и положение всей руки, то семь.
Действительность ещё сложнее. Если мы, сидя за столом, потянулись за хлебом, то мы включаем дополнительно сложную механику пальцев, а также, возможно, наклон и поворот туловища. Если мы будем рассматривать такую, более сложную, модель, то и количество степеней свободы у всей системы будет гораздо больше. Как наш мозг управляется с расчётом такой кучи координат — опять-таки тема, требующая отдельной статьи.
автор
Биомеханика: степени свободы
Степень свободы у разных "подсчетчиков" разная.
Сколько степеней свободы в опорно-двигательном аппарате человека?
Содержимое ответа
Количество степеней свободы опорно-двигательного аппарата (ОДА) человека зависит от типа суставов:
- Одноосные суставы обладают одной степенью свободы, движения в них происходят только вокруг одной оси. В организме человека таких суставов насчитывается 85. 2
- Двуосные суставы имеют две степени свободы, движения в них происходят вокруг двух осей. В организме человека 33 двуосных сустава. 2
- Многоосные суставы обладают тремя степенями свободы, движения в них происходят вокруг трёх осей. В организме человека таких суставов 29. 2
Общее число возможных движений в суставах (так называемых степеней свободы) превосходит 250. 5
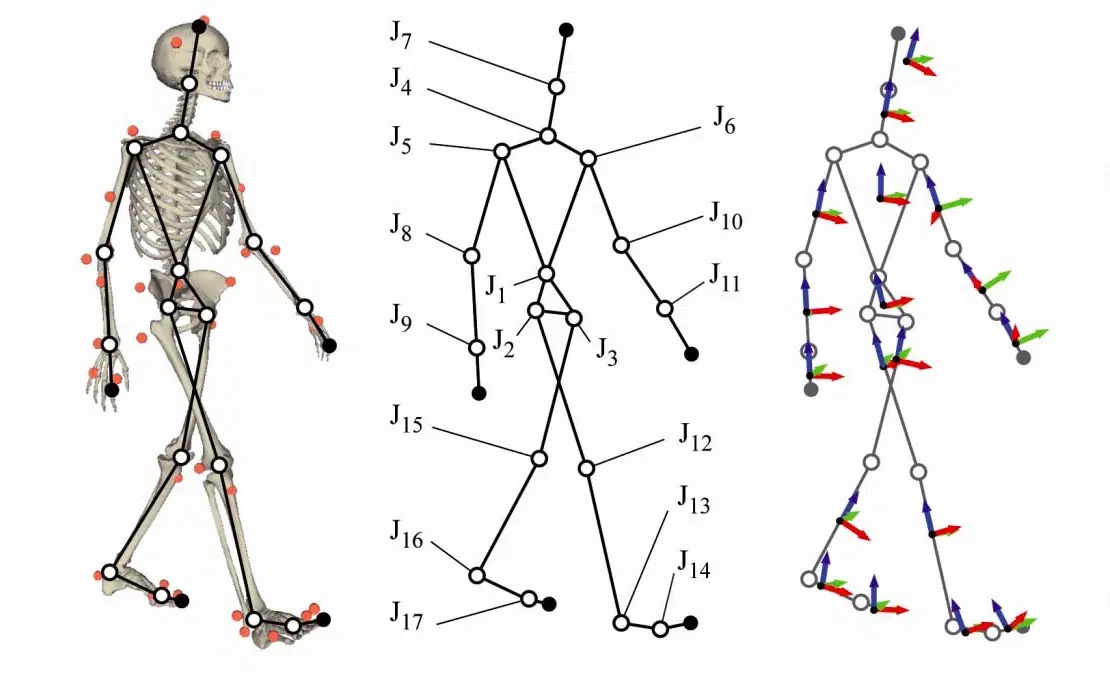
По подсчёту О. Фишера, учитывая возможные перемещения между корпусом, головой и конечностями, в теле человека не менее 107 степеней свободы1. Это не считая движений лица и внутри корпуса
В биомеханике человека число степеней свободы может быть значительным. Например:
- Кисть относительно лопатки имеет 7 степеней свободы. Это значит, что кисть по отношению к лопатке ведёт себя как свободное, не закреплённое в пространстве тело. 3
- Голова перемещается в сагиттальной и во фронтальной плоскостях и совершает вращательные движения, поэтому имеет 3 степени свободы. 3
- Верхняя конечность имеет 7 степеней свободы, то есть для обеих рук — 14 степеней свободы. 3
- Нижняя конечность (без суставов стопы) имеет 6 степеней свободы, то есть обе ноги имеют вместе 12 степеней свободы. 3
Движения в пястнофаланговых и межфаланговых суставах дают для каждой кисти и стопы 19 степеней свободы. Таким образом, человеческое тело, не считая движений туловища, имеет 105 степеней свободы. 3
Данные Нейро Яндекс.
А что скажете Вы?
Комментарии